家で仕事をしていて暇なのでiPhoneのアップデートをした。普段はだいたい家のWifi経由でやっているのだが、CDをiTunesライブラリに追加してそれと同期させるために久しぶりにiTuneにつないだらアップデートがあると表示されたのでついでにやっておこうと思った。
ダウンロードに結構時間がかかっていて、別のことをして放っておいた。しばらくたってアップデートが始まり、iPhoneの画面が黒い背景に白いリンゴと進行を示す白い横線になった。
が、横線が数ミリくらい進んだ状態で止まってしまった。
どれくらいの時間がたったかは定かではないが20分くらい止まったままだったと思う。
どう見ても進んでいないので強制的に電源を落としリカバリモードで起動しアップデートを再実行しようとしたができない。仕方がないので「復元」を選ぶがそれもできない。
何度か試してダメなので、とりあえずもう一台あるiPhoneにSIMを差し替えた。apple idを変えたりlineやpaypayが入ってないので入れたりいろいろやって1時間くらいかかる。とりあえず「ケータイがなくて困る」という事態はなんとかなった。
アップデートに失敗したiPhoneも、そう簡単に壊れないだろうと再度復元を試みる。調べると、MS StoreからダウンロードしたiTunesで失敗することがあるという情報があった。appleサイトからダウンロードしたものを使えばうまくいく、とある。
appleのサイトにもMS Storeのリンクがあるが、「ほかのバージョンをお探しですか?」のリンクからstore経由でなくダウンロードできる。(本当に違うものなのか確かめていないが)
iTunesを入れなおすと、失敗していた復元が進むようになった。
が、途中で失敗する。
lightningケーブルを変えたり、接続するUSBポートを変えたりいろいろやるがどうしてもうまくいかない。
appleに問い合わせると、appleデバイスというソフトがあるのでそれでやってみてというのでやってみたがiTunesと同じような状態。
「別のPCにつないでなおった」「macにつないでなおった」などの情報があったので別のノートPCにiTunesやappleデバイスを入れてやってみるが、同じ。
Lightningケーブルを変えると、止まる場所が多少変わったりするが、途中で失敗するのは同じ。
失敗したときに表示されたメッセージで検索してみるが、参考になる解決方法は見つからない。サポートに伝えてもそのメッセージはアップルが公開していない、と言う。
iPhoneはリセットすると通常通り起動せず、「リカバリモード」と呼ばれるらしい、黒い背景にライトニングケーブルとノートPCの絵が描かれた画面が表示されて止まる。
機種は13 miniで、iOS 18.1 にしようとして失敗した。上げる前のバージョンがなんだったか覚えていないが、18系だったはず。
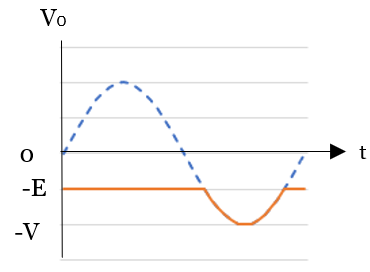
リカバリモードでPCにつなぐとiTunesで認識され、「アップデートまたは復元してください、アップデートならデータは残るが復元だと初期化される」というようなメッセージが表示され、アップデートしてみるとすぐ失敗し、復元してみると更新が始まるがリンゴマークが表示され下に進行度を示す白い線が出るが止まる。
表示されたメッセージは以下のようなもの。
iPhone "iPhone"をアップデートできませんでした。不明なエラーが発生しました(75)。067E.004B
iPhone "iPhone"を復元できませんでした。不明なエラーが発生しました(1109)。0634.0000
iPhone "iPhone"を復元できませんでした。不明なエラーが発生しました(53)。
一番惜しいパターンは、appleデバイスを使って、純正ケーブルでつないで復元したときで、
進捗の線がちょうど真ん中あたりで止まり、appleデバイス側のメッセージが「更新しています」から「確認しています」みたいなメッセージに変わってしばらくたって、53のエラーになる。
これを見ていると復元自体はしているがなんらかのチェックがうまくいかず正常終了とみなされない、みたいな感じに見える。まだ新しいし、濡らしたことはないし落としたことはあることはあるがケースをつけていてそんなに激しい衝撃を与えたことはない。ハードウェア的に破損しているようには思えない。
appleサポートにappleデバイスでやってもダメでメッセージ内容を伝えると店舗に持ち込んで見てもらうように言われる。
予約状況を見るとすぐにはできず、送る場合はさらに日数がかかる。そんな重症とは思えず、ちょっとしたことで治りそうだと思うので、appleではない一般の修理店を探してみる。ここならなおしてもらえそうかなという店があって、費用は1.5万くらい。電話してみると治るかどうかはやってみないとわからないし、費用ももっとかかる場合もある、という。ただ、その日の夜に持ち込めるということなのでとりあえず予約した。
その後も復元にトライし続け、調べていくうちにDFUモードというものがあることを知る。リカバリモードと似ているが、appleが公式には公開していないモードらしく、とにかく強制的にファームウェアを書き換えるようなモードらしい。
DFUモードへの切り替え方を説明している人は何人かいて、タイミングが少し微妙なのだが何度か入ることができ、試したが通常の復元とほとんど変わらない状況だった。
最後に、「修復ソフト」の使用を検討した。この問題について調べているときに、ずっと修復ソフトの情報が出てきてはいたが、どうも怪しく、信用できないので避けていたのだが万策尽きたので試してみることにした。
まず、広告しか出てこないものは避ける。一般のユーザーがレビューしたりブログや信用できるサイトで紹介しているようなものを探し、なかなかなかったが比較的信用できそうだったのが iMyFone Fixppo である。
一応無料で使用できるとなっているが、他のソフトも同様なのだが、無料で実施できることはごくわずかで、それで修復することはできなかった。
仕方なく5000円弱の料金を払って、名前は忘れたがアドバンストモードだかなんだかを実施すると、「Apple Mobile Device Serviceのドライバが壊れている」みたいなメッセージが表示されてそのドライバを修復するような動作がおこなわれた後、復元できるようになった。
ということはiPhone本体ではなく、PC側(ソフト)の問題だったということか。
とりあえず治ったのでよいが、PC側の問題が違うPCでも起きていたとすると、もはやそれは破損とか故障とかではなくて「不具合」ではないだろうか?
もしかしたら下記とかをやっていれば治っていたのかもしれない。
あるいは、Macにつないだら治っていたとか。MacはUSB-Cしかインターフェースがなく、iPhoneをつなげられなかったので試せなかったのだが。
ショップの予約はキャンセルした。